INTRODUCCIÓN A LA INSTRUMENTACIÓN Y CONTROL
A través de esta entrada se desglosan conceptos y definiciones básicas sobre la "Introducción a la Instrumentación y Control".
- Sistema de control de procesos.- estos sistemas fueron relacionados por primera en 1948 por Norbet Wiene en
su obra “Cibernética y Sociedad con aplicación en la teoría de los mecanismos
de control”.

Un sistema de control está definido como un conjunto de componentes que
pueden regular su propia conducta o la de otro sistema con el fin de lograr un
funcionamiento predeterminado, de modo que se reduzcan las probabilidades de
fallos y se obtengan los resultados buscados.
- Variable.- es la cantidad o condición que se mide y controla. Normalmente la variable
controlada es considerada la salida del sistema. (Universidad de Buenos Aires, 2003).
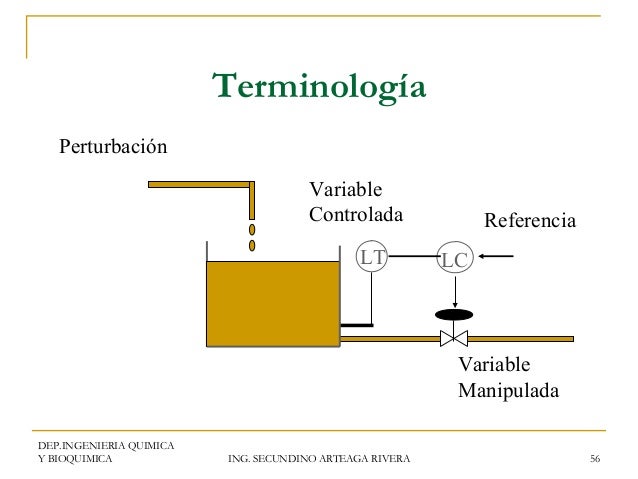
- Variable Manipulada
La variable manipulada es la cantidad o condición que es variada por el
controlador de tal manera que afecte el valor de la variable controlada.
- Perturbación
Una perturbación es una señal que tiende a afectar adversamente el valor de
la salida del sistema.

Si una perturbación es generada dentro del sistema, ésta
es llamada interna, mientras que una perturbación fuera del sistema es llamada
externa y ésta es una entrada. (Miréz, 2012)
- Repetibilidad.- es una medida estadística de la consistencia entre medidas repetidas de un
mismo carácter en un mismo individuo.
Generalmente se la denomina como ri y su valor se expresa como una
proporción. Un valor e repetibilidad de uno
indica que la medida es perfectamente consistente y repetible, y que el investigador
no comete ningún error en la medición de ese carácter. (Senar, 2010)
- Exactitud.- el Vocabulario Internacional de términos fundamentales y generales de
Metrología (VIM) define el término exactitud como el grado de concordancia
entre el resultado de una medición y un valor verdadero del mensurando.
Este término es cualitativo. Si la medición es más próxima al valor
verdadero significa que es exacta.
Según la norma UNE 82009-1, equivalente a la ISO 5725-1 el término exactitud
puede describirse de la siguiente manera:
Exactitud = Veracidad + Precisión
(MB Instrumentos, 2013)
Precisión.- la precisión se define como el grado de coincidencia
existente entre los resultados independientes de una medición, obtenidos en
condiciones estipuladas, ya sea de repetitividad, de reproducibilidad o
intermedias.


Linealidad.- la
linealidad examina qué tan exactas son sus mediciones a través del rango de
mediciones esperado. La linealidad indica si el sistema de medición tiene la
misma exactitud a través de todos los valores de referencia
Incertidumbre.- es el parámetro asociado con el resultado de una
medición, que caracteriza la dispersión de los valores que podrían ser
razonablemente atribuidos al valor a medir. El valor de incertidumbre incluye
componentes procedentes de efectos sistemáticos en las mediciones, debido a
componentes que se calcula a partir de distribuciones estadísticas de los
valores que proceden de una serie de mediciones y valores que se calculan a
partir de funciones de densidades de probabilidad basadas en la experiencia u
otra información.
Controlador.-
1 • Controlador de dispositivo (o hardware), es un
componente de software usado por el sistema para poder interactuar con el
hardware.
2 • Controlador de impresora, es un software que
convierte datos a ser impresos a una forma específica para una impresora.

3 • Controlador
de clase, es un tipo de controlador de dispositivos que puede operar en una
gran cantidad de diversos dispositivos del mismo tipo.
4 • Controlador
lógico programable (PLC en inglés), tipo de dispositivo electrónico muy usados
en la automatización industrial. V
Actuator.- es un dispositivo inherentemente mecánico cuya función
es proporcionar fuerza para mover o
“actuar” otro dispositivo mecánico.

La fuerza que provoca el actuador proviene
de tres fuentes posibles: presión neumáticos, presión hidráulica, y fuerza
motriz eléctrica (motor eléctrico o solenoide) dependiendo de el origen de la
fuerza el actuador se denomina “neumáticos” , “hidráulicos” , “eléctrico”.
Elemento final de control

Un elemento final de control es un
mecanismo que altera el valor de la variable manipulada en respuesta a una
señal de salida desde el dispositivo de control automático; típicamente recibe
una señal del controlador y manipula un flujo de material o energía para el
proceso. El elemento final de control puede ser una válvula de control,
variadores de frecuencia y motores eléctricos, una servo válvula, un relé,
elementos calefactores de carácter eléctrico o un amortiguador.
El elemento
final de control consta generalmente de dos partes:
- Un actuador que convierte la señal del controlador en un comando para el dispositivo manipulador.
- Un mecanismo para ajustar la variable manipulada.
Sensor.- un sensor
es un objeto capaz de detectar magnitudes físicas o químicas, llamadas
variables de instrumentación, y transformarlas en variables eléctricas.

Las
variables de instrumentación pueden ser por ejemplo: intensidad lumínica,
temperatura, distancia, aceleración, inclinación, presión, desplazamiento,
fuerza, torsión, humedad, movimiento, pH, etc. Una magnitud eléctrica puede ser
una resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en
un sensor de humedad), una tensión eléctrica (como en un termopar), una
corriente eléctrica (como en un fototransistor), etc.
Áreas de
aplicación de los sensores: Industria automotriz, robótica, industria
aeroespacial, medicina, industria de manufactura, etc.
Transmisor.- los
transmisores son instrumentos que captan la variable de proceso y la transmiten
a distancia a un instrumento receptor, tal como un: indicador, registrador,
controlador o una combinación de éstos. Un sistema transmisor consiste
generalmente en:
·
Un elemento primario
o detector de variaciones de la magnitud a medir.
·
El elemento
transmisor, algunas veces lleva incorporado el elemento detector.
·
El elemento receptor
de las distintas magnitudes de la variable a medir (indicador, registrador,
totalizador, etc).
Transductor.- es un dispositivo capaz de transformar o convertir una determinada
manifestación de energía de entrada, en otra diferente a la salida, pero de
valores muy pequeños en términos relativos con respecto a un generador.

El tipo de
transductor ya nos indica cual es la transformación que realiza (por ejemplo
electromecánico, transforma una señal eléctrica en mecánica o viceversa). Es un
dispositivo usado principalmente en la industria, en la medicina, en la
agricultura, en robótica, en aeronáutica, etc., para obtener la información de
entornos físicos y químicos y conseguir (a partir de esta información) señales
o impulsos eléctricos o viceversa. Los transductores siempre consumen cierta
cantidad de energía por lo que la señal medida resulta atenuada.
Acondicionador.- es un dispositivo que convierte un tipo de señal
electrónica en otro tipo de señal.
Su uso principal es convertir una señal que
puede ser de difícil lectura mediante instrumentación convencional en un
formato que se puede leer más fácilmente.
- Micro controlador.- un microcontrolador es un circuito integrado
digital que puede ser usado para muy diversos propósitos debido a que es
programable. 
Está compuesto por una unidad central de proceso (CPU), memorias
(ROM y RAM) y líneas de entrada y salida (periféricos).Un microcontrolador
puede usarse para muchas aplicaciones algunas de ellas son: manejo de sensores,
controladores, juegos, calculadoras, agendas, avisos lumínicos, secuenciador de
luces, cerrojos electrónicos, control de motores, relojes, alarmas, robots,
entre otros. (Sherlin-Box, 2014)
- Registrador.- es un dispositivo electrónico que registra datos
en el tiempo o en relación a la ubicación por medio de instrumentos y sensores
propios o conectados externamente.

- Convertidor.- es un dispositivo que recibe información en una
forma de una señal de un instrumento y transmite una señal de salida en otra
forma. (American National Standard, 1992)
- Circuito abierto o lazo abierto.- es aquel sistema en que solo actúa el proceso
sobre la señal de entrada y da como resultado una señal de salida independiente
a la señal de entrada, pero basada en la primera. No existe retroalimentación
hacia el controlador para que éste pueda ajustar la acción de control. (Jaramillo, 2010)

- Circuito cerrado o lazo cerrado.- son los sistemas en los que acción de control
está en función de la señal de salida. Los sistemas de circuito cerrado usan la
retroalimentación desde un resultado final para ajustar la acción de control en
consecuencia. (Jaramillo, 2010)
BIBLIOGRAFÍA:
American National Standard. (1992). Definitios. En A.
N. Standard, Instrumentation Symbols and Identification (pág. 11). ISA.
Jaramillo, C. (10 de Septiembre de 2010). SlideShare.
Obtenido de
https://es.slideshare.net/sistemas11/sistema-de-control-de-procesos-introduccion-a-la-ingenieria
MB Instrumentos. (29 de Septiembre de 2013). MideBien.
Obtenido de
http://www.midebien.com/consejos-practicos-para-medir-bien/cual-es-la-diferencia-entre-exactitud-y-precision
Miréz, J. (15 de Junio de 2012). JMirez Control.
Obtenido de
https://jmirezcontrol.wordpress.com/2011/04/12/c017-definicion-de-variable-contralable-variable-manipulada-control-planta-procesos-sistemas-y-perturbaciones/
Senar, J. C. (8 de Mayo de 2010). La medición de la
repetibilidad y el error de medida. Obtenido de
http://www.bcn.cat/museuciencies_fitxers/imatges/FitxerContingut1201.pdf
Sherlin-Box. (9 de Mayo de 2014). Obtenido de
http://sherlin.xbot.es/microcontroladores/introduccion-a-los-microcontroladores/que-es-un-microcontrolador
Universidad de Buenos Aires. (12 de Agosto de 2003). Materias
Facultad Ingenieria - Sistemas de Control. Obtenido de
http://materias.fi.uba.ar/6722/SISTCONTRPRIM2003.pdf



No hay comentarios:
Publicar un comentario